Teknologi / 12 minutter /
Selvkjørende biler
Selvkjørende biler kommer med mange lovnader: lave kostnader, mer fritid gjennom fjerning av bilkøer, slutt på skadde og drepte i trafikken, redusert antall biler, til og med redusert kriminalitet.
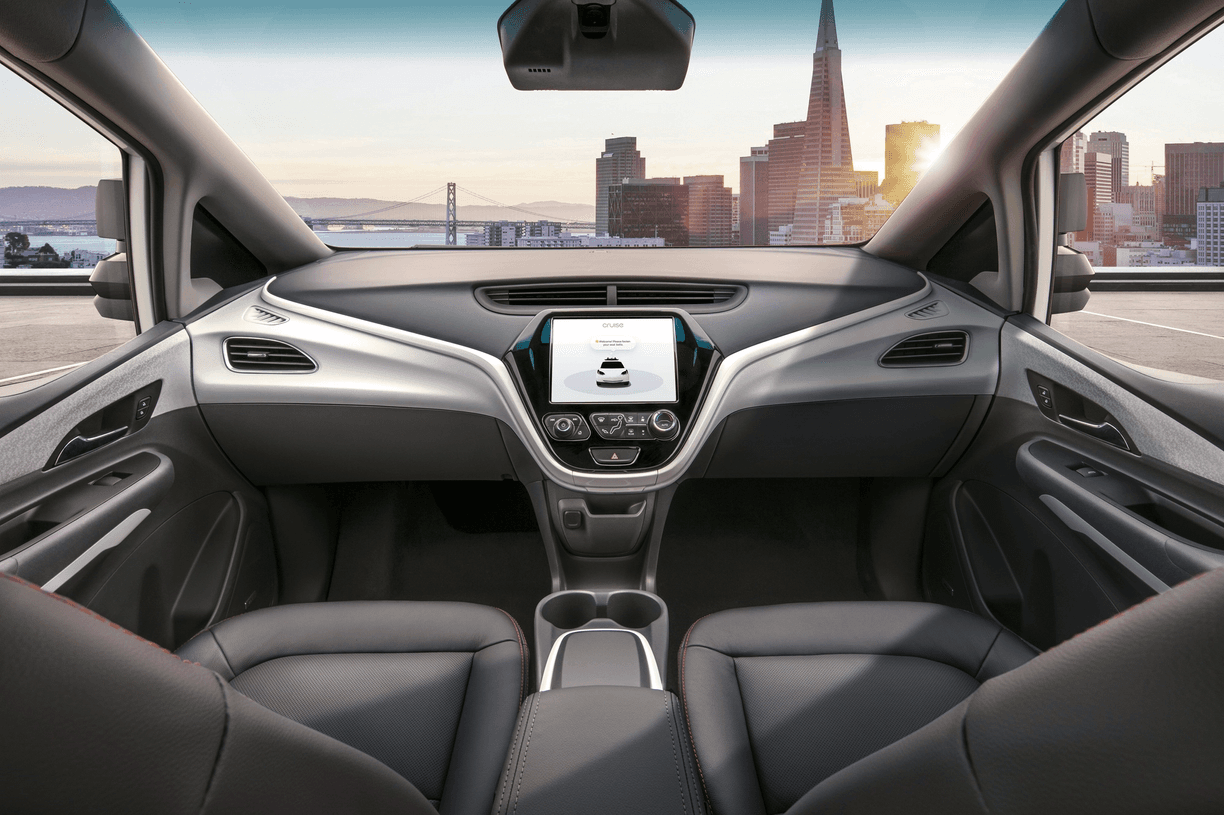
Bilde: Selvkjørende bil basert på Chevrolet Bolt (Opel Ampera-E) som skal produseres fra 2019.
Kilde og copyright: General Motors, https://www.youtube.com/watch?v=MvP82IsGqNc

Disse lovnadene gjør at mange ser for seg et enormt marked for selvkjørende biler og transporttjenester. Tradisjonelle og nye bilprodusenter som f.eks Tesla, Audi, General Motors og BMW konkurrerer med teknologigiganter fra Silicon Valley som Waymo (Google), Apple og Uber om å være først på markedet.
Mange forventer at endringene som autonome kjøretøy bringer med seg er like store som da bilen erstattet hestetransport for over 100 år siden. Men det er vanskelig å spå endringene som ny teknologi bringer med seg. Når de første bilene kom på markedet ble det spådd store samfunnsendringer. Ser vi på disse spådommene i ettertid har veldig få faktisk slått til, samtidig har det skjedd store endringer som ingen forutså.
I dette blogginnlegget ser vi nærmere på noen av aspektene rundt selvkjørende biler, men la oss først se på hva som menes med en selvkjørende bil.
Hva er en selvkjørende bil
Begrepet selvkjørende (autonom) bil kan være litt forvirrende ettersom det ofte ikke skilles mellom førerassistansesystemer, delvis autonome og helt autonome (førerløse) biler.
Bilprodusentene ønsker ofte å fremstille bilene sine som selvkjørende, selv om det de tilbyr er i praksis førerassistansesystemer, f.eks varianter av adaptive cruise control (følger bilen foran) kombinert med lane assist (bruker veioppmerking til å holde bilen i samme kjørefelt).
Mye av det som tilbys av slike systemer i dag, fantes allerede i testbiler for over 20 år siden. I 1994 gjennomførte Ernst Dickmanns fra Universitetet i München forsøk der en ombygd Mercedes Benz S-klasse kjørte over 100 mil på motorveier i tett trafikk, i hastigheter opp mot 130 km/t med feltskifte og forbikjøringer. Grunnen til at dette var mulig allerede på dette tidspunktet er at kjøring på motorvei med adskilte kjørefelt er relativt enkelt med kjøring i f.eks et bymiljø, her slipper man å ta hensyn til motgående trafikk, fotgjengere, syklister, trafikkskilt og de fleste trafikkregler.
Men noe av det som gjør at selvkjørende biler har fått mye oppmerksomhet de siste årene er den teknologiske utviklingen med en eksplosiv økning i prosessorkraft, raskere trådløse nett og bedre og billigere sensorer, gjør at man ser for seg å tilby biler som er førerløse i løpet av kort tid.
Vi gjør ting nå som vi bare drømte om for 5 år siden
SAE International (Society of Automotive Engineers) har definert 6 nivåer innenfor førerassistanse og selvkjøring:
Nivå 0: Ingen autonomi
Fører gjør alt.
Nivå 1: Førerassistanse
Bilen nødbremser eller holder avstanden til bilen foran. Fører utfører resten av kjøringen.
Nivå 2: Delvis autonomi
Bilen kan gasse, bremse og styre under gitte forutsetninger. Fører overvåker trafikkbildet og må overta umiddelbart.
Eksempel på aktører: Tesla, Mercedes med flere.
Nivå 3: Autonomi under gitte forutsetninger
Bilen kan kjøre selv under gitte forutsetninger (f.eks motorvei på sommerstid).
Bilen overvåker trafikkbildet, men fører må overta på kort varsel (noen sekunder) dersom det oppstår noe bilen tror den ikke kan håndtere.
Nivå 4: Høy autonomi
Bilen kan kjøre selv i enkelte områder (f.eks der det finnes avanserte 3D kart).
Eksempel på aktører: Waymo, General Motors.
Nivå 5: Full autonomi
Bilen kan kjøre selv overalt (som en vanlig fører).
Samspill mellom fører og system
Noen av utfordringene med selvkjørende biler med lavere nivå av autonomi er behovet for at fører må overvåke trafikkbildet hele tiden og kunne overta på svært kort tid dersom det oppstår noe bilen ikke kan håndtere.
Waymo (Google), som er blant de som har jobbet mest med autonome kjøretøy, oppdaget tidlig under testing at “reservesjåføren” stolte alt for mye på bilen. Fordi bilen stort sett kjører fint selv, stoler man alt for mye på datasystemet, og folk slutter å være oppmerksom. Man opplevde at folk falt i søvne eller tok på seg makeup bak rattet.
Folk lærer seg relativt raskt å stole på datamaskinen og innser i liten grad dens begrensninger, selv om den ikke kan kjøre bil bedre enn et lite barn. Ville du valgt å la et lite barn kjøre bilen din samtidig som du selv ikke fulgte med på veien?
Undersøkelser viser at folk trenger ca 30 sekunder på å orientere seg fullstendig om trafikkbildet dersom de plutselig må overta førerrollen. Dette gjør det nesten umulig å kunne stole på at mennesket kan overta for systemet på kort varsel. Waymo bestemte seg derfor tidlig for at de ikke skulle tilby selvkjørende biler på nivå 3, men vente til man kunne tilby full autonomi.
Hvordan sikre seg mot uoppmerksomme mennesker?
Det finnes flere ulike løsninger for å sikre at autonome systemer kun brukes der de forventes å fungere, og sikre at brukeren er oppmerksom. Det mest vanlige er å ha sensorer som merker at man har hendene på rattet og varsler brukeren med lyd og lys dersom dette ikke er tilfelle.
Den sannsynligvis beste løsningen på markedet i dag er den som brukes av General Motors på biler med “Super Cruise”. Her får man ikke på slått på “Super Cruise” dersom man ikke befinner seg på en et motorvei med midtdeler. I tillegg har bilen et innvendig kamera i bilen som filmer ansiktet og øynene til føreren. Dersom brukeren ser vekk for lenge vekk fra veien får man en advarsel før systemet slås av.
Begrensninger i teknologien
Delvis eller helt selvkjørende biler benytter seg av en rekke ulike teknologier. Alle helt eller delvis autonome biler har alltid minst følgende komponenter:
- En eller flere sensorer (f.eks kamera) som oppfatter objekter i miljøet rundt bilen.
- Programvare som gjenkjenner og klassifiserer objekter (f.eks bil, sykkel, fotgjenger) basert på dataene fra sensorene. Denne programvaren er i stor grad basert på maskinlæring.
- Programvare som styrer bilen basert på informasjon om objektene. Her brukes i mindre grad maskinlæring, og mer forhåndsprogrammerte algoritmer.
I tillegg det også vanlig å bruke skytjenester, raske trådløse nett, bil-til-bil-kommunikasjon og GPS-posisjonering.
Lidar (light + radar)
Lidar kartlegger objekter ved å sende ut laserlys ved hjelp av roterende speil. Lyset som reflekteres brukes til å lage et detaljert bilde av objekter. Dette bildet er så detaljert at det f.eks kan brukes til å finne ut i hvilken retning en person står, slik å kunne forutse hvilken vei personen mest sannsynlig vil gå, eller å oppdage håndsignaler fra en syklist.
Se et utvalg filmer her - VelodyneLiDAR: https://www.youtube.com/channel/UCddm2Lpqjin-pVKlZovk46w
Ulempen med lidar er at det er relativt dyrt, selvkjørende biler må ofte ha mange lidar sensorer for å lage et fullstendig 360 graders bilde. I tillegg baseres de på en teknologi med roterende speil som er relativt lite robust. Derfor brukes lidar foreløpig kun på helt autonome biler (f.eks Waymo) og ikke på delvis autonome kjøretøy selges til forbrukere. Det jobbes med utvikling av solid state lidar som ikke bruker speil, men disse er foreløpig ikke konkurransedyktige.
Radar
Tilsvarende som Lidar kan Radar brukes til å kartlegge objekter i nærheten av kjøretøyet, men ved å bruke radarbølger istedet for laserlys. Sammenlignet med lidar gir radar et langt mer begrenset og grovkornet bilde av omgivelsene. F.eks vil man kanskje ikke oppdage et lite barn som står ved siden av en bil fordi refleksjonen fra bilen overskygge refleksjonen fra barnet. Fordi det er vanskelig å skille mellom farlige og ufarlige objekter med radar må bilen programmeres til å ofte ignorere objekter. Dette gir radar mange svakheter f.eks problemer med å oppdage stillestående objekter, spesielt i høyere hastigheter.
Kamera
Kamera komplementeres bruken av andre sensorer, og kan i en viss grad erstatte dem. Men kamera har en del ulemper ved at det påvirkes i stor grad av sollys, regn og snø. Det er også store utfordringer med å måle avstand til objekter og tolke bilder riktig, f.eks kan det være vanskelig å skille mellom en reklameplakat og en reell person.
GPS posisjonering og detaljerte 3D kart
Googles selvkjørende biler bruker digitale kart med svært høy nøyaktighet, disse inneholder informasjon om alle detaljer som fortauskanter, skilter, broer etc. Når bilen kjører sammenlignes data fra sensorer med disse kartene slik at bilen vet på centimeteren hvor den er. I tillegg gir dette en ekstra trygghet ettersom man får et dobbelt lag med sikkerhet, man er ikke kun avhengig av sensorer og maskinlæring for å tolke informasjon.
Dette er blant annet årsaken til at Audi, BMW og Daimler (Mercedes) kjøpte Nokias kartenhet Here for 3 milliarder dollar i 2015. Here tilbyr ekstremt nøyaktig 3D kart og skytjenester med trafikkinformasjon.
De aktørene som er nærmest å tilby førerløse biler i dag (ifølge en rapport fra Navigant Research) bruker en kombinasjon av alle teknologiene nevnt ovenfor:
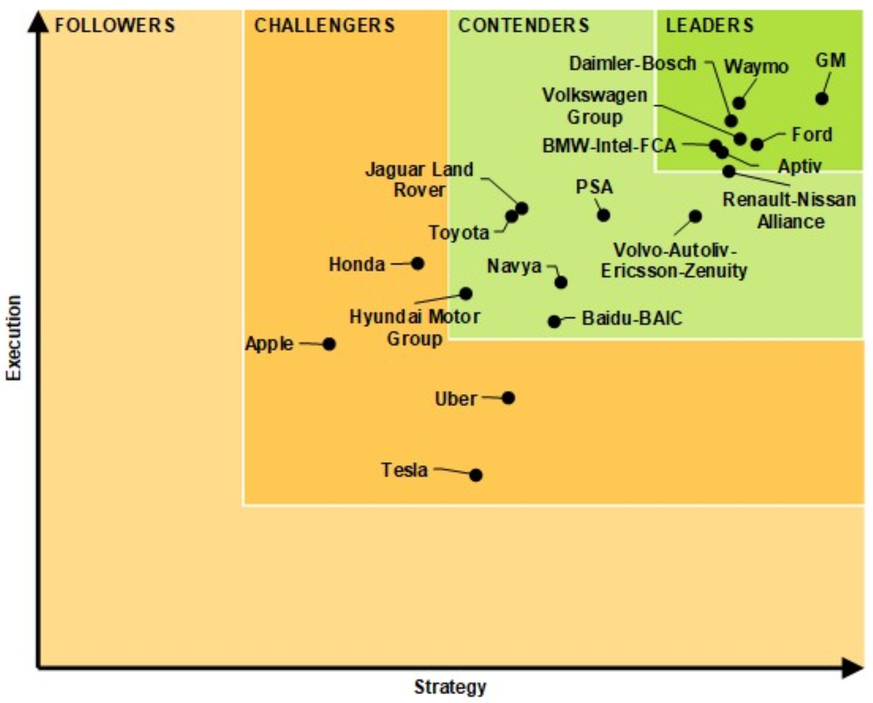
Bilde og copyright: Navigant Research
Siden alle disse sensorene gjør disse bilene utrolig dyre, vil de første selvkjørende bilene som kommer på markedet være eid av flåteoperatører (f.eks bilprodusenter eller teknologiselskaper). Disse bilene vil da benyttes som en førerløs taxitjeneste. De fleste spår at det vil ta mange år før du selv kan kjøpe en førerløs bil.
Elon Musk tror derimot at Tesla i fremtiden skal klare å lage en selvkjørende bil uten bruk av lidar og med mindre prosessorkraft. Tesla tilbyr derfor i dag en opsjon “evnen til å kjøre helt på egen hånd”, der bilen gjennom softwareoppgradering skal kunne bli selvkjørende på et senere tidspunkt. Men dette har vist seg å bli langt vanskeligere enn de trodde, og mange stiller spørsmålstegn om sensorene og datakraften i bilen er kraftig nok til noen gang å oppnå dette og Tesla sluttet nylig å tilby denne opsjonen.
Mindre bileierskap, men mer eller mindre trafikk?
Dagens biler står ubrukt ca 95% av tiden, men dersom førerløse biler eies av en flåteoperatør der man raskt og enkelt kan bestille transport, forventer man at utnyttelsesgraden opp til 10 ganger høyere. Dette kombinert med billig drivstoff (elektrisitet) gjør at mange tror selvkjørende flåtebiler vil redusere kostnaden for transport til en brøkdel av dagens kostnad ved å eie egen bil.
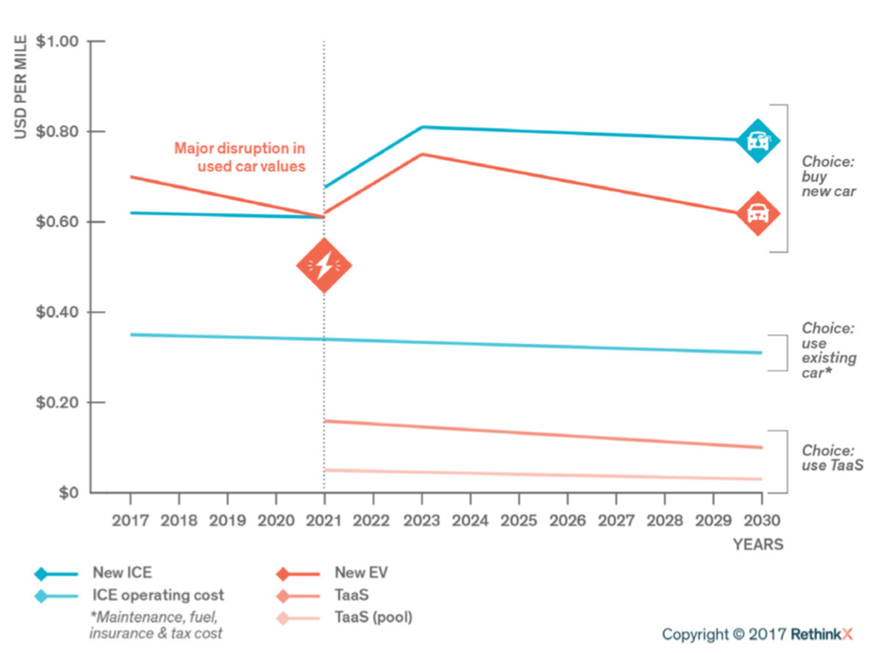
Bilde og copyright: RethinkX - Rethinking transportation
Det forventes derfor at privat bileierskap i de store byene vil gå ned til fordel for transporttjenester eid av de store bilprodusentene eller teknologiselskapene. Utenfor de store byene vil det kanskje fortsatt være vanlig å eie egne biler, iallefall i en overgangsperiode, men fordi man slipper å kjøre selv og kan f.eks jobbe eller sove i bilen vil f.eks pendling inn til storbyer bli mer attraktivt.
Ved at dør-til-dør-transport blir så rimelig er det også en stor fare for at både sykkel og tradisjonelle kollektivløsninger som buss, t-bane og tog blir utkonkurrert. Hvorfor skal man bry seg med å gå til bussen dersom du kan få en selvkjørende taxi på døren til omtrent samme pris?
I enkelte byer ser man allerede at bruk av kollektivtjenester er synkende, mens transporttjenester som Uber og Lyft vokser kraftig. Mange ser det derfor som sannsynlig at autonome kjøretøy vil føre til at trafikkmengden på veiene vil øke fremfor å minke dersom det ikke gjøres strategiske politiske grep for å motvirke dette. Det er derfor stor skepsis til hvorvidt selvkjørende biler fører til mindre trafikk også blant norske politikere.
Riktignok vil selvkjørende biler kunne kjøre tettere og raskere på motorveier, men dette vil først kunne skje når vanlige biler er utfaset og de har veiene for seg selv.
Samspill med andre trafikanter
I dag kommuniserer vi som bilførere med andre trafikanter hele tiden. Kanskje nikker vi til en fotgjenger for å signalisere at vi har sett han, kanskje vinker vi til en syklist at han kan sykle over fortauet? Tilsvarende oppfatter vi signaler fra andre trafikanter og oppfører oss etter gitte forventninger.
En førerløs buss i Las Vegas krasjet da en søppelbil rygget ut av en blindgate. Føreren av søppelbilen hadde naturligvis vikeplikt, men var vant med at biler og busser flyttet seg når han begynte å rygge. Den selvkjørende bussen valgte derimot å stå i ro fordi den ikke var programmert til å tenke på dette scenariet.
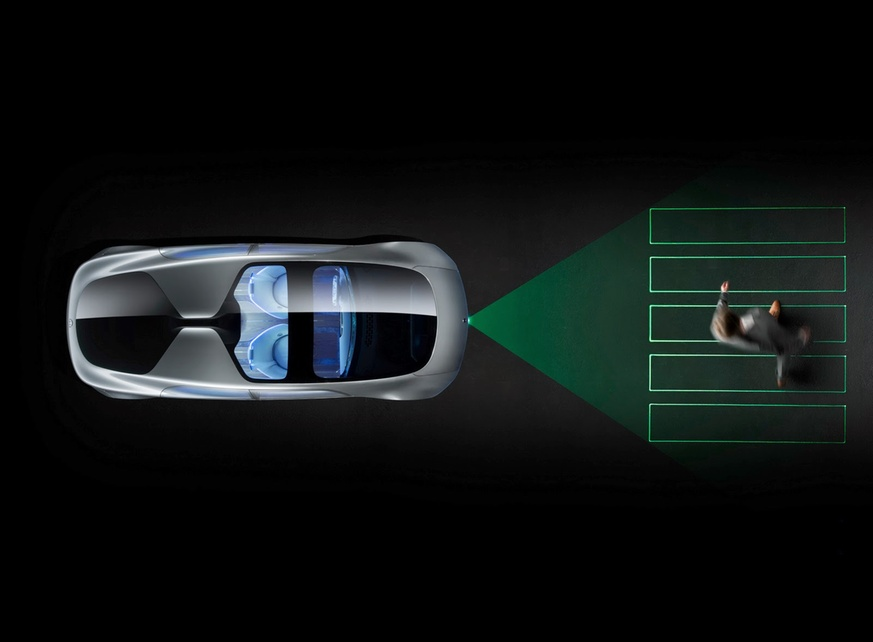
Selvkjørende biler trenger derfor en måte å signalisere til medtrafikanter. En måte dette kan skje på er gjennom lys. Bilprodusentene har nå begynt å se på hvordan man kan tegne symboler på veien med laserlys for å kommunisere med fotgjengerne:En Mercedes Benz lyser opp et virtuelt fotgjengerfelt for å signalisere at det er trygt å gå
Personvern og kriminalitet
Stort sett alle nye biler på markedet i Norge er utstyrt med kamera, GPS og andre sensorer. Mange av disse sender også data til bilprodusenten, f.eks posisjon i tilfelle bilen skulle bli stjålet. Men fordi bilene er privateid kan disse dataene i liten grad brukes i ettertid ettersom eier av bilen har opphavsrett til dem.
Dersom bilen derimot eies av en flåteoperatør vil dataene også eies av denne. Man forventer en sterk priskonkurranse mellom aktørene innenfor førerløse taxier og man vil da forsøke å finne andre måter å tjene penger enn bare å ta betalt for selve turen. En måte å gjøre dette på er ved å vise reklame til passasjerer, men også ved å selge data. Både dine egne personopplysninger (f.eks hvor du reiser fra og til) og data som fanges inn av kamera og andre sensorer. Dette betyr at vi kan bli overvåket i langt større grad i den fysiske verden på lik linje som vi blir på nettet i dag.
Politiet vil også sannsynligvis være interessert i disse dataene, ettersom det vil være nesten umulig å bevege mange steder utendørs uten å bli fanget opp av kameraene til en førerløs bil. Noe som mest sannsynlig vil føre til at mye kriminalitet enklere kan oppklares.
Ulykker med selvkjørende biler
Mennesker kan være utrolig gode sjåfører, men dessverre er alt for mange uoppmerksomme i trafikken. En selvkjørende bil er derimot oppmerksom hele tiden og blir ikke forstyrret av barn i baksetet og bruker ikke sosiale medier mens den kjører.
Selv om man forventer at selvkjørende biler vil redusere antall ulykker er dette foreløpig ikke bevist, og er i beste fall noe som ligger endel år frem i tid. Flere tragiske dødsulykker med autonome biler har vært omtalt i media i det siste. En av ulykkene var med en Tesla Model X som kjørte på autopilot. I videoen nedenfor har noen (vært dum nok til å) gjenskapt hva som gikk galt.
Det vi ser her er at det er sannsynligvis flere årsaker til at ulykken får et så tragisk utfall:
- Bilen følger skillelinjene mellom kjørefeltene og bilens programvare blir forvirret på det aktuelle punktet
- Føreren følger ikke med på veien fordi han stoler for mye på autopiloten og oppdager ikke hva som skjer
- Begrensningene i sensorene på bilen (radar) gjør at den ikke oppdager betongmuren før det er for sent
En annen mye omtalt ulykke, er Ubers bil som kjører ned og dreper en fotgjenger:
Når man ser videoen er det lett å tenke at det var så mørkt at det var umulig å oppdage fotgjengeren og at ulykken var unngåelig. Men det er to ting som ikke fremgår av videoen:
- Området er relativt godt opplyst med gatelys, men dette fremgår ikke bra nok fordi kameraet i bilen er for dårlig.
- Fotgjengeren har allerede krysset 3 kjørefelt i lav hastighet, så både fører og bil har hatt god tid til å oppdage henne.
Som vi ser er årsaken til også denne ulykken sannsynligvis en kombinasjon av mangler i sensorer/programvare og at fører stoler for mye på bilen:
- Uber har gitt ut informasjon om at fotgjengeren ble oppdaget av bilens sensorer, men at programvaren valgte å ignorere dette fordi den tolket fotgjengeren som ufarlig (på lik linje som den ignorerer en plastpose i veien). Dette tyder på at programvaren ikke har tolket at dette var en fotgjenger, dette kan kanskje koples til at Uber har kuttes ned på antall lidar sensorer sammenlignet med tidligere biler for å spare penger.
- Føreren følger ikke med på veien og oppdager ikke fotgjengeren.
Fra Carl Benz laget sin første bil i 1886, gikk det 14 år til det ble innført krav om førerkort og tilhørende praktisk førerprøve i Tyskland i 1910. De neste 14 årene kommer det til å være millioner av selvkjørende biler på veiene, men så langt har det i mange land vært stilt få eller ingen krav til slike biler. Dette blir forklart med at prosesser med å få på plass krav og tester tar lang tid og man har ikke ønsket å forsinke den teknologiske utviklingen.
Kanskje er det på tide at man begynner å innføre en praktisk førerprøve også for førerløse biler før de slippes ut på offentlige veier? Uten slike krav risikerer vi at kappløpet rundt førerløse biler gjør at man kutter kostnader eller testing for å være tidlig ute.
For delvis autonome biler ser vi at handoff mellom bil og menneske kan være en utfordring. Kanskje bør det stilles krav til hvordan dette skal ivaretas akkurat på lik linje med andre krav til biler, som krav om lys og sikkerhetsbelte?
Ta gjerne kontakt hvis du er interessert i å diskutere mer om selvkjørende biler.